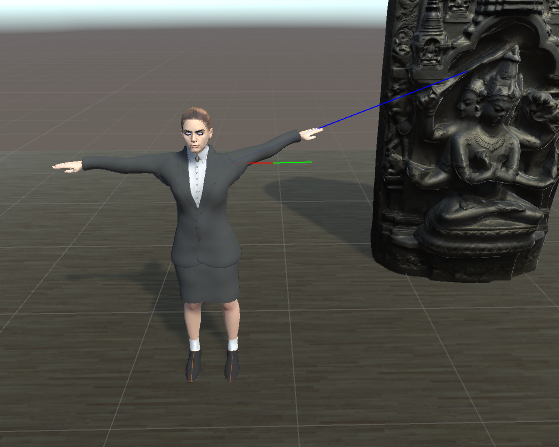
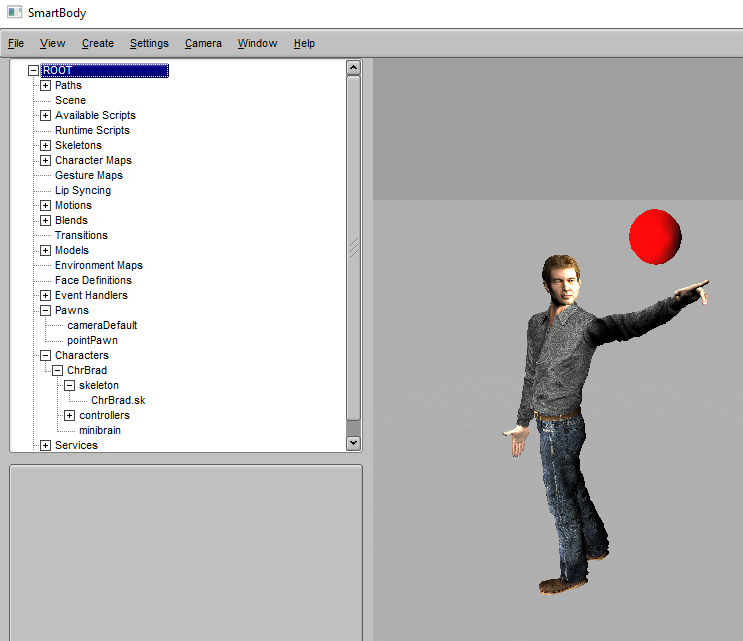
จะทำ avatar ให้ชี้ที่วัตถุได้แบบ แม่นยำ
ที่เห็นในโปรแกรม smartbody ก็คือ ทำ animation ทิ้งไว้หลายๆอัน ชี้ซ้ายขวา ขึ้นลง สูงต่ำ ประมาณ40กว่าอัน
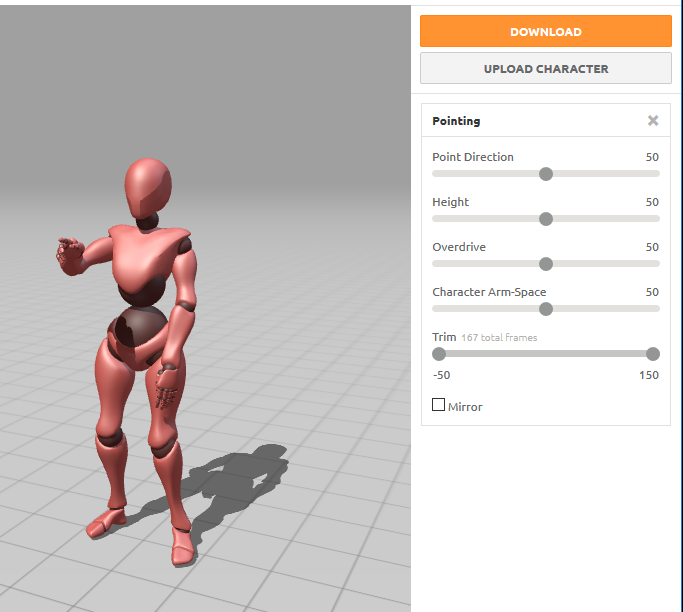
เสร็จแล้วก็มี ฟังก์ชัน pointing(ใส่วัตถุที่จะชี้) ซึ่งมันจะหา animation ที่มีตำแหน่งของมือที่ชี้ อยู่ใกล้ ตำแหน่งจริงที่จะชี้ มากที่สุด
แต่ว่า พอของที่จะชี้ มันอยู่ไกล…animationที่โปรแกรมเลือกมาให้เลยชี้ไม่ตรงของที่จะให้ชี้ (ไม่ตรงแบบเหมือนชี้มั่ว…หรือมันหา animation ให้ไม่ได้เลย random เอานะ?)
เห็นว่าถ้าเป็นฟังก์ชัน grab(ใส่วัตถุที่จะจับ) โปรแกรทก็จะเลือก animation ที่ใกล้ๆมาให้ แล้วก็ทำ inverse kinematic เพื่อยืดมือออกไปจับของอะนะ (แต่ไม่ได้ลองว่าถ้าของอยู่ไกลเกินมือเอื้อมจะเป็นยังไงแฮะ)
**
เราเลยพบว่า การเตรียม animation ทิ้งไว้นั้น ลำบาก เสียเวลา แถมยังชี้ไม่ตรงอีก(หรือไม่ก็ต้องมีanimationเตรียมไว้เยอะมากๆ)
เลยจะเสนอ algorithm สำหรับ pointing…ซึ่งมันก็คือ inverse kinematic 2 ข้อต่อ (ของคนอื่นเค้าเขียนทิ้งให้ใช้ฟรี….)
พอเอามาลองใช้แล้ว ก็เจอว่า แขนมันบิดผิดรูป กับ มือไม่แผ่มาหาทาง user (แบบว่าเวลาจะแนะนำอะำร มือมันควรจะหันออกมาทางคนที่กำลังพูดด้วย)
ตอนนี้ลอง fix องศาหมุนมือให้หันกาuserอยู่ แต่ก็ดูไม่สมจริงนิดนึง
กับถ้า เปลี่ยนตำแหน่ง avatar องศาที่fixไว้ มันใช้ไม่ได้ กลายเป็นชี้มั่วแขนบิดไปเลย…
กับอีกอันคือ ชี้มือขวา หรือมือซ้าย น่าจะทำให้มัน auto ได้นะ….
***
ยังมีัเรื่องของ ตำแหน่งของ avatar พอจะให้มันเดินหลบ หรือเดินตาม user ได้..
คือถ้าเขยิบนิดๆก็okอยู่…แต่พอต้องเขยิบมากๆ อยู่ใกล้ user เกินไป , user เดินไปอีกทางละ จะเดินตามอะไรยังไงตอนไหนดี….