เริ่มจากอ่านหนังสือเกี่ยวกับ pointcloud processing ถึงส่วนของ feature extraction แล้วเค้าพูดถึง Harris corner detector ใน image processing (pointcloud ใช้ Harris3d)
ก็เลยเสิร์จอ่านเรื่อง Harris corner detector ไปโผล่เว็บ opencv ไปเจอ sobel operator (คุ้นๆ) แล้วก็อ่านไปเรื่อยๆไปเจอคำว่า convolution คุ้นๆ แต่นึกไม่ออก อ่านไปอ่านมาก็อ้อ ใช้ใน CNN convolution neuron network ลืมไปได้ยังไง
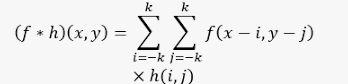
ภาพบน convolution ของ image (discrete)
คือมี image f (มอง pixel x,y เป็น matrix ) กับ kernel/operator/filter y (matrix 3*3/5*5)
แล้วเราก็เอา kernel ไปวน convolution ทั่ว image เพื่อสร้าง image ใหม่
เช่น blur image ใช้ gaussian operator, edge image ใช้ sobel operator
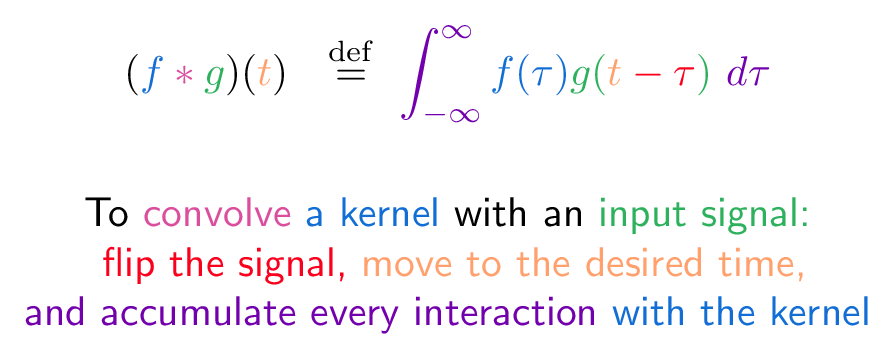
ภาพล่าง convolution ของ signal (continuous) คือเปลี่ยนจาก ซิกม่าเป็นอินทิเกรต
แล้ว derivative มาจากไหน คือมันคุ้นๆว่า เวลาหา edge ของ image อะ มัน diff หาความเปลี่ยนแปลงของ pixel รอบๆ ถ้าค่า pixel ต่างกันมาก คือตรงนั้นมี edge
Sobel operator is a popular edge-detection filter that approximates the first derivative of the image. There are two Sobel kernels, one for detecting horizontal edges and one for vertical edges:
chatgpt
อ้อออ sobel operator คือเอามาใช้แทนการ diff ได้นี่เอง
แล้วก็ยังมี laplacian filter
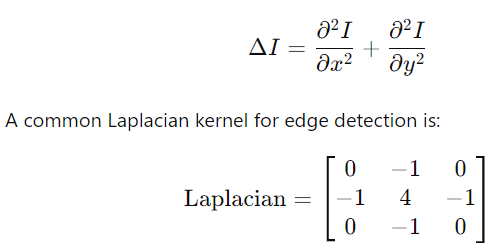
the Laplacian filter approximates the second derivative and is used to detect areas of rapid intensity change (like edges).
chatgpt
คือไปอ่านเรื่องข้างบนนี้มา กับ กบก็พึ่งอ่านหนังสือ calculus จบไป เลยนึกขึ้นได้ว่าเรื่อง diff มันมีคำ 2 คำ ที่ความหมายคือการ diff นี่แหละ แต่ต่างกันยังไงไม่รู้
derivative (n/adj) represents the rate of change of a function at a particular point.
อัตราการเปลี่ยนแปลง ณ จุดๆนึง นี่เอง
differentiate (v) is the process of finding the derivative of a function.
ก็คือการคำนวณ diff
ปล. ย้อนไปที่ Harris corner detector ไปอ่านหลักการมัน (ซึ่งยังไม่เข้าใจ) มีพูดถึง Taylor expansion ก็ไปถามchatดู
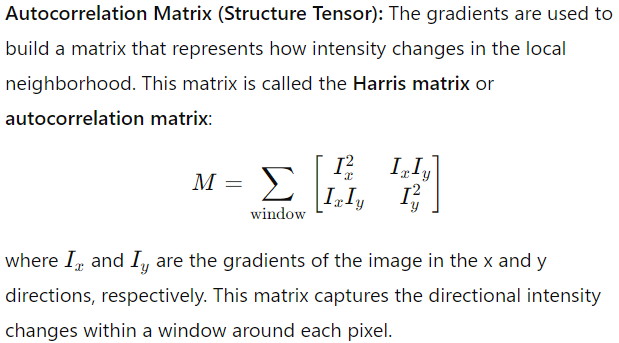
the Harris corner detector uses a second-order Taylor expansion to model how the intensity of an image changes in the local neighborhood around each pixel
chatgpt
อ้อออ Harris corner detector ใช้ Taylor expansion ขั้นที่สองด้วยนะ ในการหาว่า pixel ณ จุดนั้นๆ มีความแตกต่างจาก pixel โดยรอบแค่ไหน (เพื่อเอาไประบุ corner จาก eigenvalues ของ Matrix M)
ไปต่อกันที่ Taylor expansion มันเอาไป ใช้ในการเขียนสมการ(ประมาณค่า) ของฟังก์ชันที่ซับซ้อน เช่น sin(x), e^x
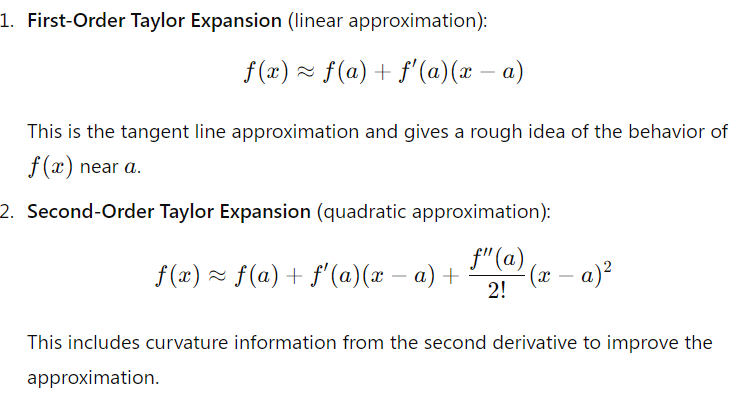

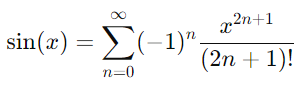
ไม่ค่อยเข้าใจละ ไว้เจอกันรอบหน้าค่อยมาอ่านอีกรอบละกัน