Robot
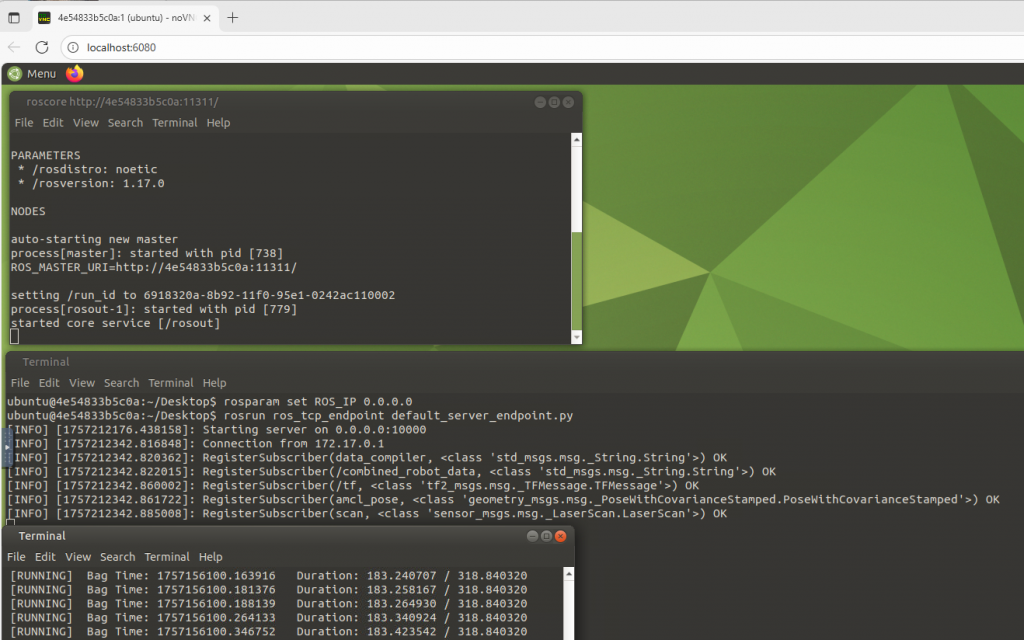
- rosparam set ROS_IP <ros pc ip>
- rosrun ros_tcp_endpoint default_server_endpoint.py
- rosbag play room_record.bag –loop
plan to run the rosbag in docker: tiryoh/ros-desktop-vnc:noetic 10000:10000 6080:80
the docker directory is link to pc at C:\Users\dellg15\ros1_ws
Some ROS hint when fail to build or run
- source /opt/ros/noetic/setup.sh
- rosdep update
- rosdep install –from-paths src –ignore-src -r -y
- catkin_make –pkg <pkg name>
- rm -rf build/ devel/
- dos2unix <filename.py>
- chmod +x filename
- convert xx.pgm xx.png
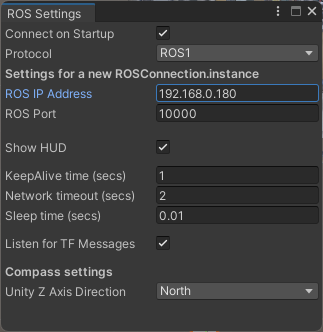
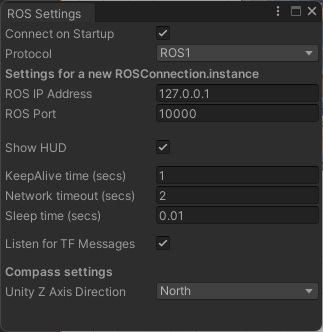
Unity
Windows > Package Manager > + Add pakage from git url
https://github.com/Unity-Technologies/ROS-TCP-Connector.git?path=/com.unity.robotics.ros-tcp-connector#v0.7.0