พอดีว่าจะลอง tutorial Simple Background Estimation in Videos using OpenCV (C++/Python)
ลองรันโค๊ดpython จำได้เคยinstall python anoconda อยู่
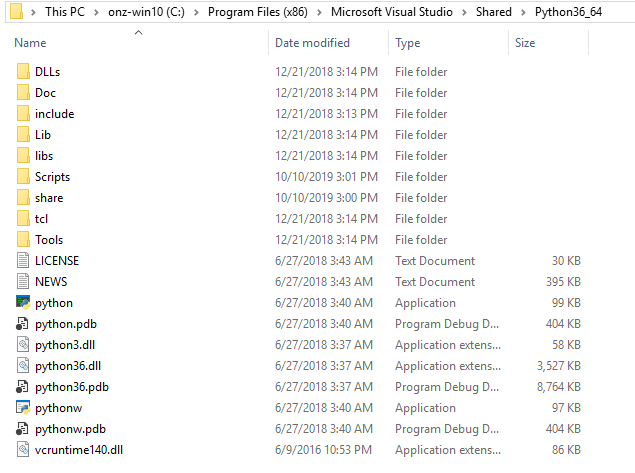
ลองเสิร์จหาดู ไปอยู่ในโฟลเดอร์ C:\Program Files (x86)\Microsoft Visual Studio\Shared\Python36_64
ก็เอา โฟลเดอร์นี้ไป add ใน environment path จะได้เรียก python ผ่าน command line ได้
run cmd as administrator จะได้ install library ได้
python -m pip install numpy
python -m pip install opencv-python
python -m pip install scikit-image
python -m pip install scipy
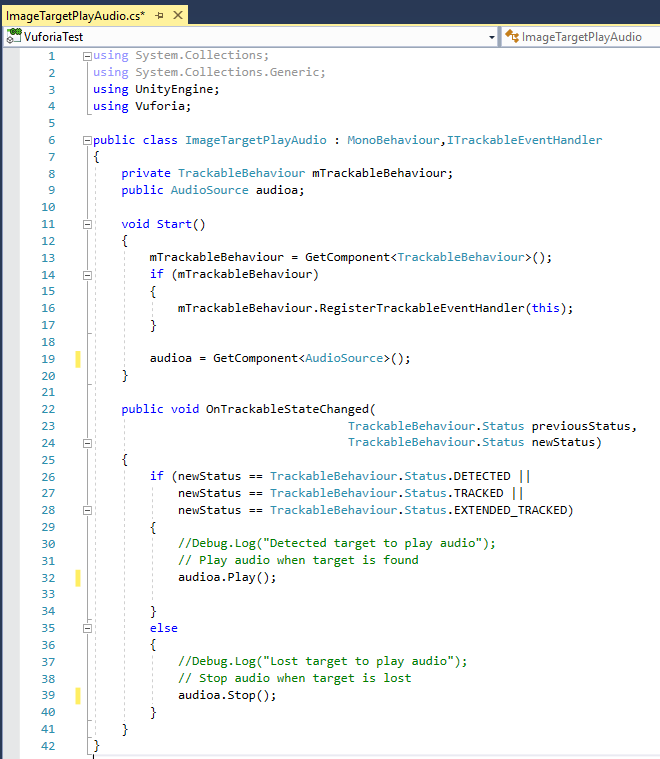
cd C:\learnopencv-master\VideoBackgroundEstimation
python removeVideoBg.py รันโปรแกรม
เป็นโปรแกรมตัด background ของวีดีโอ โดยที่มุมกล้องไม่ขยับ
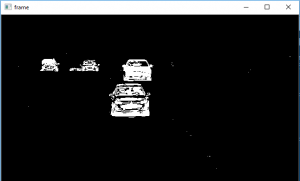
ตอนแรกโปรแกรมก็จะคำนวณ background ของ video โดยหาค่า median แล้วก็โชว์ภาพbgที่คำนวณได้

พอเราปิดหน้าต่างรูป bg โปรแกรมจะโชว์วีดีโอที่ตัด bg ออกแล้ว
c++ build
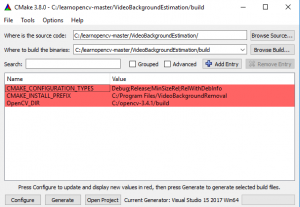
เปิด cmakeแล้วก็ ระบุ source กับ build folder
ที่เหลือ โปรแกรมจะเรียกอ่านไฟล์ CMakeLists.txt เอง
แต่ว่าเราต้องกำหนด path openCV ไว้ใน environment ก่อน
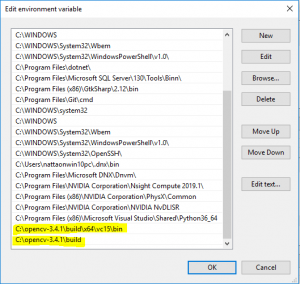
ถ้าไม่ใส่ bin folder ตอนรัน visualstudio มันจะ error หา dll ไม่เจอ
ถ้าไม่ใส่ build folder, ถึงแม้เราจะกำหนดเอง cmake จะหา build folder ของ opencv ไม่เจอ
แต่ว่าโปรเจค c++ รันแล้วไป error ตรงเปิดวีดีโอแฮะ
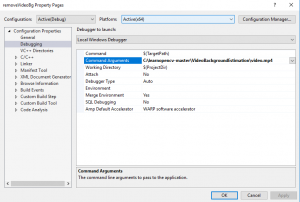
คือว่า วีดีโอกับ ตัวโปรแกรมไม่ได้อยู่โฟสเดอร์เดียวกันละ
เลยต้องมาเซ็ต command argument ให้ visualstudio อ่าน video pathที่กำหนดไว้